

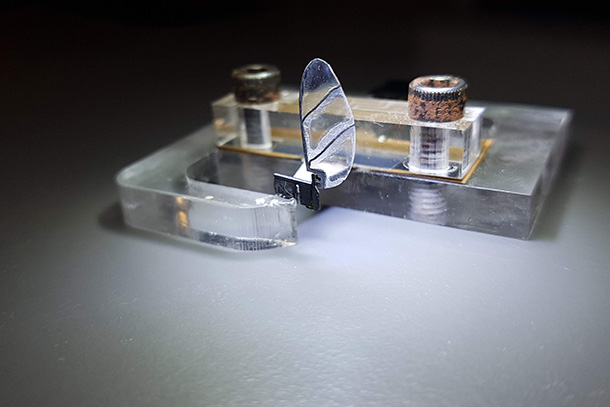
Collaborators at the University of Colorado Boulder created a robotic wing made of plastic and cardboard laminate to study the mechanism by which fruit flies compensate for wing damage in flight. Credit: Provided by Kaushik Jayaram. All Rights Reserved.
Fruit flies use corrective movements to maintain stability after injury
The findings could inform design of fault-tolerant robots, researchers say
November 18, 2022
By Mariah R. Lucas
UNIVERSITY PARK, Pa. — Fruit flies can quickly compensate for catastrophic wing injuries, researchers found, maintaining the same stability after losing up to 40% of a wing. This finding could inform the design of versatile robots, which face the similar challenge of having to quickly adapt to mishaps in the field.
The Penn State-led team published their results today (Nov. 18) in Science Advances.
To run the experiment, researchers altered the wing length of anesthetized fruit flies, imitating an injury flying insects can sustain. They then suspended the flies in a virtual reality ring. Mimicking what flies would see when in flight, researchers played virtual imagery on tiny screens in the ring, causing the flies to move as if flying.
“We found flies compensate for their injuries by flapping the damaged wing harder and reducing the speed of the healthy one,” said corresponding author Jean-Michel Mongeau, Penn State assistant professor of mechanical engineering. “They accomplish this by modulating signals in their nervous system, allowing them to fine-tune their flight even after an injury.”
By flapping their damaged wing harder, fruit flies exchange some performance — which lowers only slightly — to maintain stability by actively increasing damping.
“If you drive on a paved road, friction is maintained between the tires and the surface, and the car is stable,” Mongeau said, comparing damping to friction. “But on an icy road, there is decreased friction between the road and tires, causing instability. In this case, a fruit fly, as the driver, actively increases damping with its nervous system in an attempt to increase stability.”
Co-author Bo Cheng, Penn State Kenneth K. and Olivia J. Kuo Early Career Associate Professor of Mechanical Engineering, noted that stability is more important than power for flight performance.
“Under wing damage, both performance and stability would typically suffer; however, flies use an ‘internal knob’ that increases damping to maintain the desired stability, even if that leads to further decreases in performance,” Cheng said. “In fact, it has been shown that it is indeed the stability, instead of the required power, that limits maneuverability in flies."
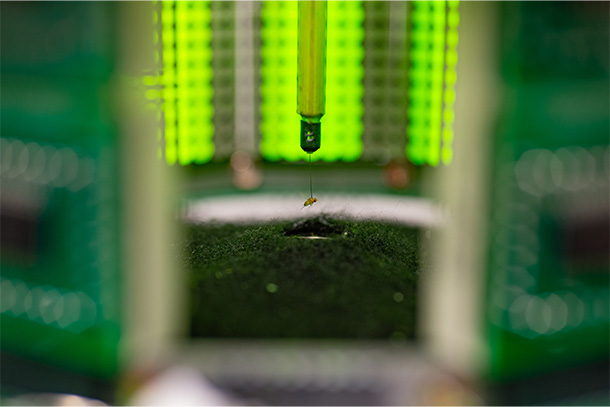
To run the experiment, researchers suspended fruit flies with a magnetic tether system in a virtual reality ring, pictured here. Mimicking what flies would see when in flight, researchers played virtual imagery on tiny screens in the ring, causing the flies to move as if flying. Credit: Kelby Hochreither. All Rights Reserved.
The researchers’ work suggests that fruit flies, with just 200,000 neurons compared to 100 billion in humans, employ a sophisticated, flexible motor control system, allowing them to adapt and survive after an injury.
“The complexity we’ve uncovered here in flies is unmatched by any existing engineering systems; the sophistication of the fly is more complex than existing flying robots,” Mongeau said. “We are still far away on the engineering side of trying to replicate what we see in nature, and this is just another example of just how far we have to go.”
With increasingly complex environments, engineers are challenged to design robots that can adapt quickly to faults or mishaps.
“Flying insects can inspire the design of flapping robots and drones that can respond intelligently to physical damage and maintain operations,” said co-author Wael Salem, Penn State doctoral candidate in mechanical engineering. “For example, designing a drone that can compensate for a broken motor in flight, or a legged robot that that can rely on its other legs when one gives out.”
To study the mechanism by which flies compensate for wing damage in flight, collaborators at the University of Colorado Boulder created a robot prototype of a mechanical wing, close in size and function to that of a fruit fly. Researchers snipped the mechanical wing, replicating the Penn State experiments, and tested the interactions between the wings and the air.
“With a mathematical model only, we need to make simplifying assumptions about the structure of the wing, the motion of the wing and the wing-air interactions to make our computations tractable,” said co-author Kaushik Jayaram, assistant professor of mechanical engineering at the University of Colorado Boulder. “But with a physical model, our robot prototype interacts with the natural world much like a fly would, subject to the laws of physics. Thus, this setup captures the intricacies of the complex wing-air interactions that we do not yet fully understand.”
In addition to Mongeau, Cheng, Salem and Jayaram, the co-authors include Benjamin Cellini, Penn State Department of Mechanical Engineering; and Heiko Kabutz and Hari Krishna Hari Prasad, University of Colorado Boulder.
The Air Force Office of Scientific Research and the Alfred P. Sloan Research Fellowship supported this work.